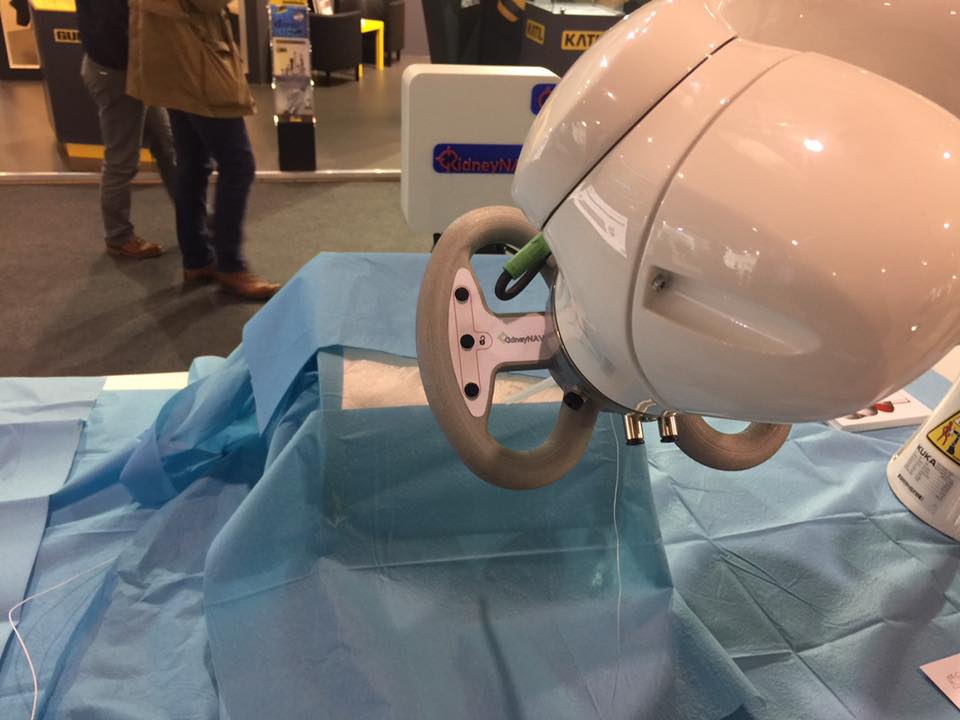


De 23 a 26 de novembro, a EST mostrou na EMAF 2016 uma evolução do projeto de desenvolvimento de um sistema de cirurgia guiada para punção percutânea, traduzida na utilização de um robô colaborativo (indústria 4.0) para assistir à picada dos alvos anatómicos.
O sistema, que despertou grande interesse junto dos visitantes da EMAF 2016, esteve presente no stand da empresa ESI, parceira de investigação da Escola Superior de Tecnologia em vários projetos.